山田 陸空斗さん【三期生紹介】
神奈川県横浜市 中学3年生
研究対象 タラバガニ
―プロジェクトに応募したきっかけは?
まず楽しそうだったから、というのがあります。
学校の部活(ロボット探究部)でロボットのプログラミングを主に取り組んでいますが、大会で3Dプリンターを使う機会がありました。その時に自分がモデリングしたものがうまく印刷できたことに大きな快感を覚えて、本プロジェクトを見つけた時「やりたい」と思いました。
また、生物にも興味があり、人間にはない特徴を持つ生物を知る楽しさや、人に伝える楽しさを知っているので、まさに自分にぴったりなプロジェクトだと思いました。
―テーマを選んだ理由を教えてください。
入学式の時は「シーラカンス」を研究したいと考えていましたが、とても貴重で、研究を進めることが困難なため、もう少し身近であり私の興味に関係する「タラバガニ」の脚の構造について研究することに決めました。ロボット探求部に所属する理由でもありますが、機会の中の構造、歯車の中などに興味があります。そこで、タラバガニの脚の構造について、調べることにしました。
―研究対象の特徴や魅力はどんなところですか?
カニよりもヤドカリに近い生物で、足の本数は10本と変わりませんが、目立つ脚の本数が異なります。目立たない脚は鰓室(さいしつ)に差し込まれており、鰓(えら)の掃除をする役割があります。
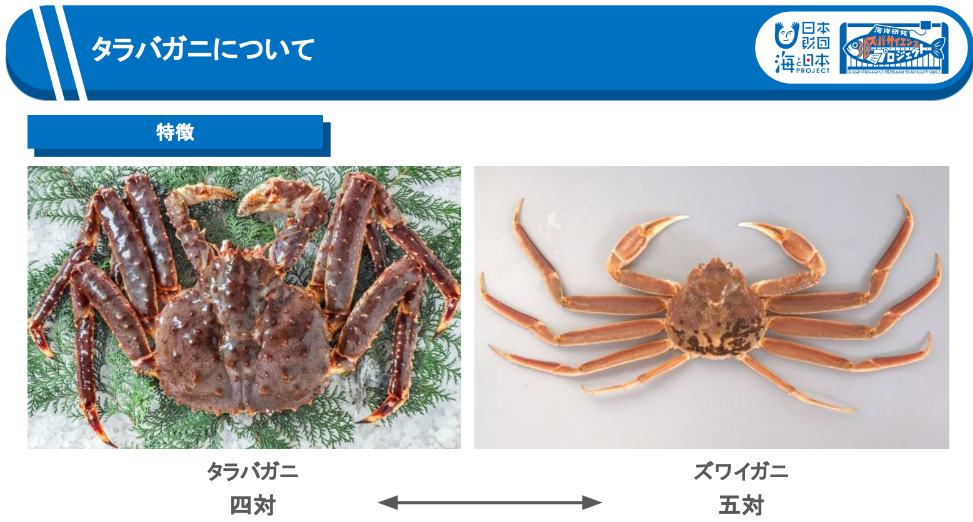
歩き方にも特徴があります。タラバガニは、関節が前後左右にも曲がるため前歩きができます。
殻が左右非対称なことも特徴です。カニに似ていない甲殻類がカニに似た形態に進化することをカーシニゼーション(カニ化)と呼びます。

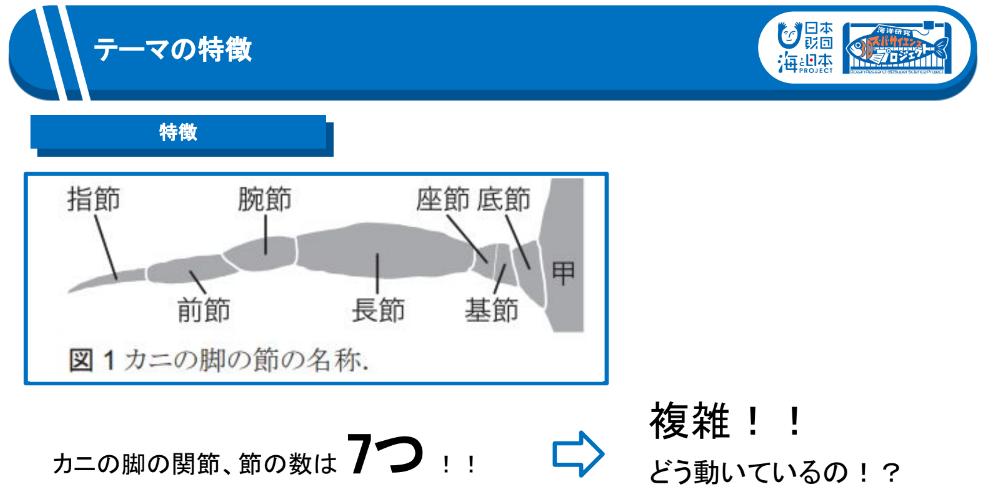
カニ型のロボットはありますが、実際の脚の関節を表しているものでは無かったので、どうやって動いているのか気になり、タラバガニの脚の関節について調べてみました。
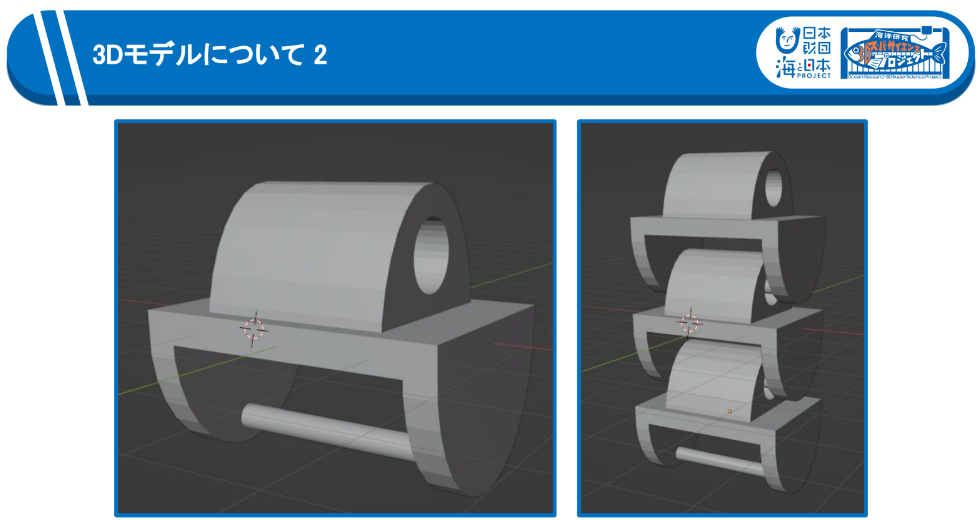
まず、私が行ったのは、カニの脚の3Dモデルを動かすための機構の開発から着手しました。最初につくった機構がこちらです。
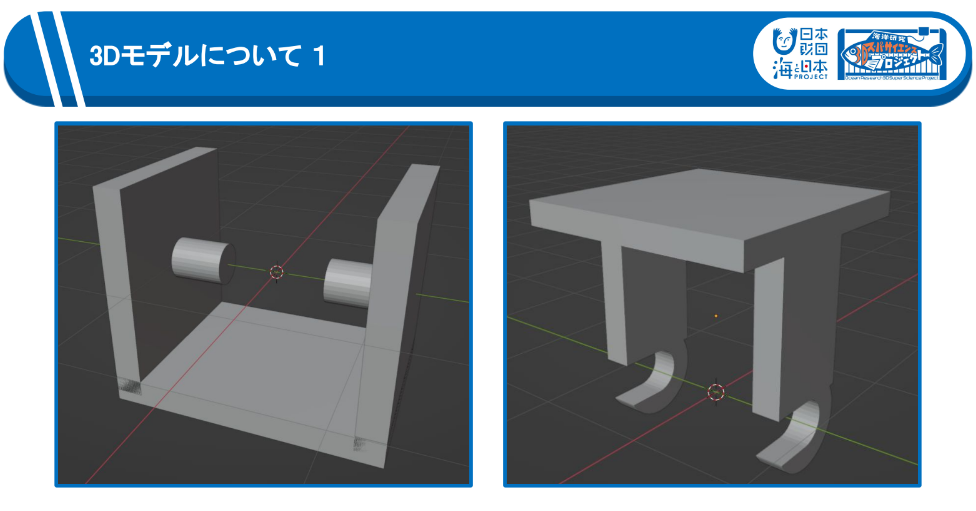
上記だと、外れやすい欠点がありました。
同期の渡邉翔君のアドバイスをもとに作成したものです。棒が、穴の中に入るような構造にすることで、振っても外れないようにできました。
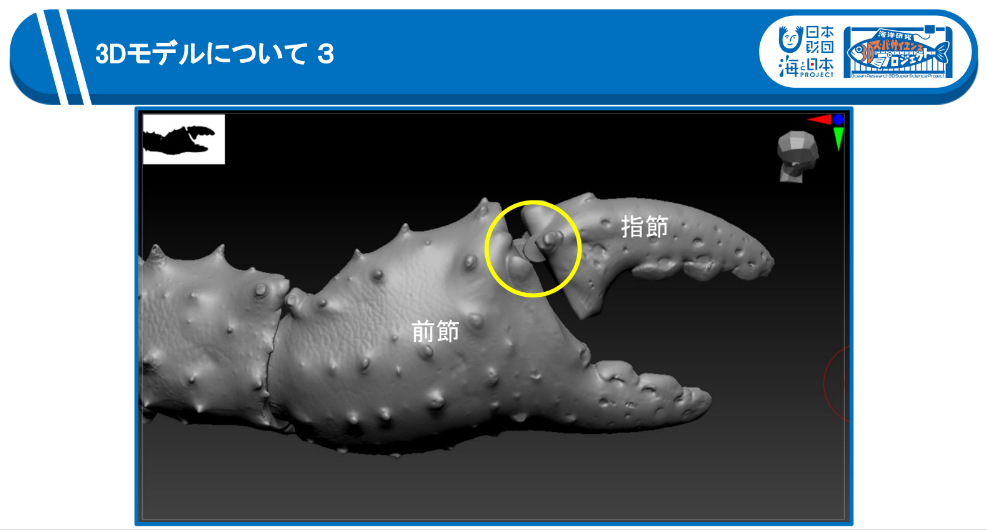
その構造を、スキャンしていただいた前節と指節の間に繋げて、ハサミの開閉ができるような仕組みにしました。
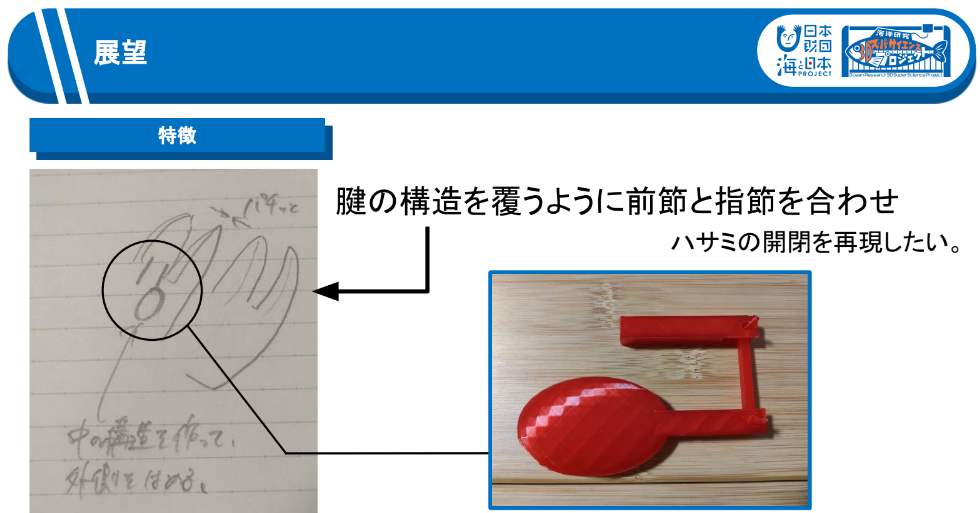
しかし、この動きは実際のタラバガニの動きと異なっていたので、もっとリアルな動きにしたいと思い、「腱(けん)」の動きを再現するモデルをつくりました。これから、腱の構造を覆うように前説と指節を合わせ、ハサミの開閉を再現したいです。
――プロジェクトでの学びや、将来やりたいことは何ですか?
例えば今回研究したタラバガニの構造もそうですし、今まで気にしていなかったことを気にすることができて、興味をもっと深堀することで身近な生物の不思議さに気づくことができたことが学びです。
将来的には、このプロジェクトで学んだ経験を活かして、生物の違いや構造の特徴を伝えられるモデルを制作したり、3D技術を活かしたゲーム開発者などや、生物学者にも興味があります。


